Feeling the Robot: The Role of Haptics in Medical Robotics
Introduction
Medical robotics has rapidly transformed modern healthcare. Robotic systems are increasingly used to assist surgeons in performing complex procedures with high precision, stability, and minimally invasive techniques. These systems can enhance surgical dexterity, filter tremor, and provide access to anatomical regions that are difficult to reach with traditional instruments.
However, despite their advantages, many robotic surgical systems reduce or completely eliminate one of the most important sensory channels in surgery: the sense of touch.
In conventional open surgery, surgeons rely heavily on tactile feedback to perceive tissue stiffness, detect anatomical structures, and modulate the forces applied to organs and surgical tools. When robotic systems mediate the interaction between the surgeon and the patient, these tactile cues are often lost.
Haptic technologies aim to restore this missing sensory channel by providing artificial tactile and force feedback to the operator. By reintroducing the sense of touch into robotic interfaces, haptics has the potential to significantly improve the safety, precision, and effectiveness of medical robotic systems.
The Importance of Touch in Robotic Surgery
Touch plays a fundamental role in many surgical tasks. Surgeons constantly evaluate mechanical properties of tissues during procedures such as:
- palpation to detect tumors or abnormalities
- tissue manipulation and dissection
- needle insertion and suturing
- tool–tissue interaction in minimally invasive surgery
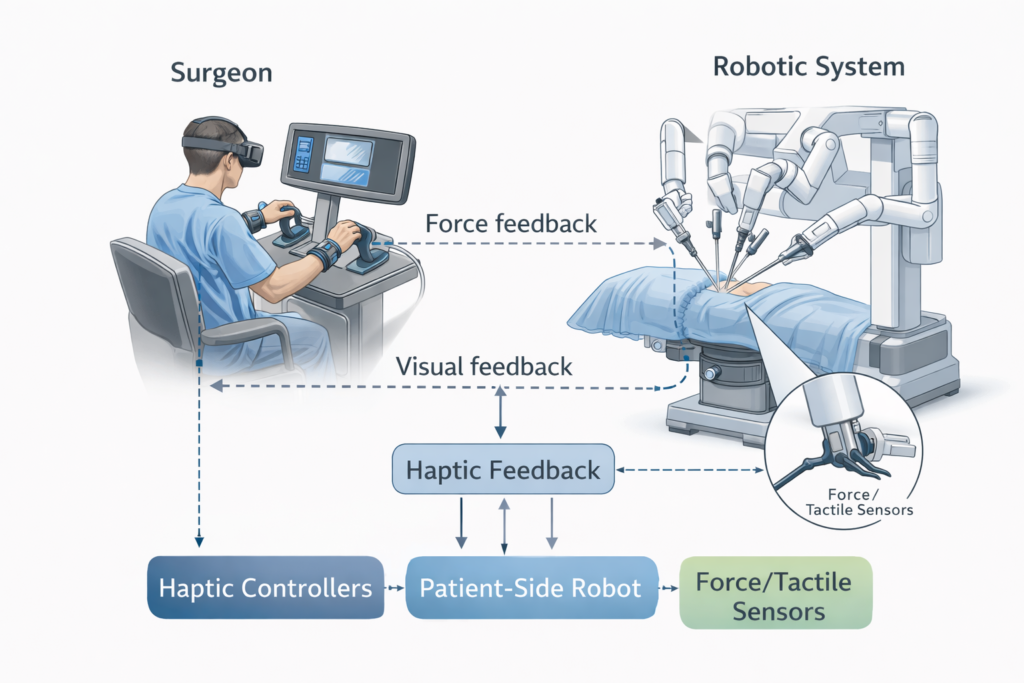
In robotic surgery, the surgeon typically controls instruments from a console, observing the surgical field through a camera system. While vision remains the primary feedback modality, the absence of tactile cues can make it difficult to estimate interaction forces with tissues.
This limitation can lead to excessive force application or reduced confidence during delicate manipulations. Haptic feedback systems address this challenge by providing force and tactile information directly to the surgeon’s control interface.
Types of Haptic Technologies in Medical Robotics
Several types of haptic technologies are being explored in medical robotic systems.
Force Feedback Interfaces
Force feedback systems transmit interaction forces from robotic instruments back to the surgeon’s hands through the control interface.
These systems measure forces at the surgical instrument tip using sensors or estimate them using control models. The forces are then rendered on the surgeon’s interface using motors or actuators.
This approach allows the surgeon to feel resistance from tissues during manipulation, improving control and reducing the risk of damaging delicate structures.
Tactile Feedback
Tactile feedback systems focus on reproducing localized sensations on the skin, such as vibration, pressure, or texture.
These systems can simulate contact events or tissue interactions that may not be easily conveyed through force feedback alone. For example, tactile cues can indicate when an instrument touches a structure or when a threshold force is exceeded.
Wearable devices such as fingertip interfaces or tactile gloves are increasingly explored for this purpose.
Soft and Wearable Haptic Devices
Recent research has explored lightweight and wearable haptic devices that can be integrated into surgical control interfaces.
These systems can deliver tactile cues to the operator while maintaining natural hand movements. Wearable haptic technologies may be particularly useful in training environments or teleoperation scenarios where mobility and comfort are important.
Applications of Haptics in Medical Robotics
Haptic technologies enable several important applications in medical robotics.
Robotic Surgery
In robotic-assisted surgery, haptic feedback can improve the surgeon’s perception of tool–tissue interaction. This allows more precise force control and helps avoid excessive pressure on delicate tissues.
Researchers are investigating systems that integrate force sensors directly into surgical instruments to provide real-time tactile feedback.
Teleoperation and Remote Surgery
One of the most promising applications of haptics in medical robotics is teleoperated surgery, where surgeons control robotic systems from remote locations.
In these systems, haptic feedback allows the operator to feel the interaction forces experienced by the remote robot. This improves situational awareness and enhances the realism of remote manipulation.
Such technologies could enable expert surgeons to perform procedures in remote or underserved regions.
Robotic Palpation and Diagnostics
Haptic sensing is also used in robotic systems designed to perform diagnostic palpation.
Robotic probes equipped with force or tactile sensors can detect variations in tissue stiffness that may indicate tumors or abnormalities. These systems can assist clinicians by providing quantitative measurements of tissue properties.
Surgical Training and Simulation
Medical robotics platforms are increasingly used in training environments. Haptic feedback enables realistic simulation of robotic procedures, allowing trainees to practice tool manipulation and force control before operating on real patients.
Combining robotics, VR simulation, and haptic feedback can create immersive training platforms that accelerate skill acquisition.
Current Challenges
Despite the promising potential of haptics in medical robotics, several challenges remain.
Sensor Integration
Measuring interaction forces at the surgical instrument tip is technically difficult due to the small size of instruments and sterilization requirements.
Stability in Teleoperation
Force feedback systems must ensure stable interaction between the operator and the remote robot, especially when communication delays are present.
System Complexity
Adding haptic feedback increases the complexity of robotic systems in terms of hardware, control algorithms, and safety requirements.
Cost and Clinical Adoption
Commercial surgical robots are already expensive systems. Integrating advanced haptic technologies must be balanced against cost and clinical usability.
Future Perspectives
Research in medical robotics is rapidly advancing, and haptic technologies are expected to play an increasingly important role in future systems.
Several emerging trends are shaping the field:
- soft tactile sensors integrated into surgical instruments
- AI-based estimation of interaction forces when sensors are not available
- wearable haptic interfaces for intuitive robot control
- multimodal feedback combining vision, touch, and audio
The integration of these technologies could lead to robotic systems that provide surgeons with a much richer perception of the surgical environment.
Conclusion
Haptics represents a key enabling technology for the next generation of medical robotic systems. By restoring the sense of touch in robotic interfaces, haptic feedback can enhance surgical precision, improve safety, and expand the capabilities of teleoperated procedures.
Although several technical challenges remain, ongoing advances in sensing, control, and wearable interfaces are steadily bringing haptic-enabled medical robotics closer to clinical practice.
In the future, the combination of robotics, artificial intelligence, and haptic technologies may fundamentally reshape how surgeons interact with patients, robots, and digital medical environments.